
工业机器人被选为自动化解决方案中绝招的理由
在自动化需求日益高涨的今天,作为解决人手不足以及拓展商机的绝招,人们对于工业机器人的关注度越来越高。工业机器人具有通用性和灵活性,即使在难以导入专用机的现场,或难以进行大规模设备改造的现场等,工业机器人也具有易应用的优势。
此外,通过与导入机器人系统的专业集团–系统集成商(SIer)开展协作,从提出方案到试运行、启动、正式运用,整个系统升级都得以顺畅完成。
进而,川崎重工从2021年6月起开始运用可迅速连接机器人与周边设备,轻松构建系统的“K-AddOn”平台。导入机器人需要连接机械手、各种传感器、视觉等周边设备,为了事先验证和认证其可连接性,川崎为用户准备了开放型的平台,以致力帮助用户减少导入时所需的验证设备可连接的成本。
此外,通过让机器人进行作业,也可以积累包括加工条件在内的示教数据以及实绩数据。所积累的数据有助于其他机器人的二次利用、进度管理、成果收集、确保可跟踪性。

机器人的种类大致可分为“工业机器人”和“非工业机器人”。前者主要活跃在制造业、物流、农业、畜牧业等领域中。而后者则是指用于警备、医疗、社会福利、宇宙航天等现场的机器人,Pepper以及清扫机器人等也属于此类。
先来说说什么是工业机器人?
全球首台工业机器人1962年诞生于美国。美国工程师George Charles Devol, Jr.提出“通过Teaching(示教)和Playback(再现)来灵活应对自动化的机器人”,他的思路与被誉为“机器人之父”的企业家Joseph Frederick Engelberger擦出了火花,由此诞生了名为“Unimate(=拥有通用能力的作业伙伴)”的工业机器人。
川崎重工迅速与制造、销售“Unimate”的Unimation公司签订了技术引进合同。全面动员技术力量,致力实现日本国产化,并于1969年发表了日本首台工业机器人“川崎Unimate2000型(机械手)”。其后,日本国产工业机器人的开发以汽车产业为中心,不断加快步伐。原本在电气设备以及精密机械领域拥有高精技术的日本国内制造商,实力得以充分发挥,日本在不久后就成为全球范围内的机器人大国。
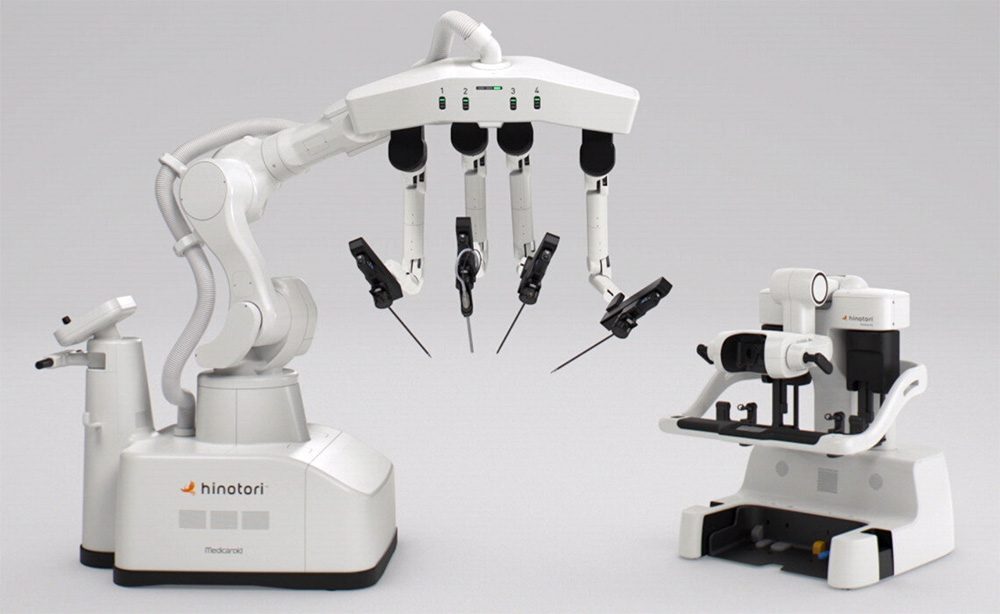
工业机器人的种类大致可分为6种。首先在初期,广泛普及的是像炮台一样在台座的中心部位设置旋转轴,机械臂上下旋转+伸缩进行作业的的“极坐标型机器人”。首台日本国产工业机器人“川崎Unimate2000型”也属于此种类型。早期活跃在舞台上的还有与该款相似的“圆柱坐标型机器人”。这种机器人以旋转轴为中心,采用可上下移动+伸缩的机械臂机构。而“直角坐标型机器人”则不使用旋转轴,通过纵×横×高三个方向正交的滑动来实现三维运动。该类型的特点是,安装面积变大,结构却较为简单,易于控制。
目前应用最广泛的是“垂直多关节型机器人”。由具有多个像人类手臂一样的关节(=轴)的机械臂+旋转轴构成,活跃于焊接、码垛、组装等各类用途中。而“水平多关节型机器人”则由水平方向的旋转轴和垂直方向的直线轴构成。由于上下运动的前端部分向水平方向移动,适合在高度稳定的工作台上的作业。而擅长快速作业的则是“并联型机器人”。通过以并列(并行)的方式配置的多个关节控制前端,实现高速且精密的动作,用于抓取传送带上的流动轻量工件等。

川崎重工开发的首台日本国产工业机器人“川崎Unimate”。在日本私家车普及的时代,汽车行业对于工业机器人寄予了厚望,被视为“3K劳动(译者注:3K是日语中累活、脏活、危险活的缩写)”的焊接工序首先开始投入工业机器人。
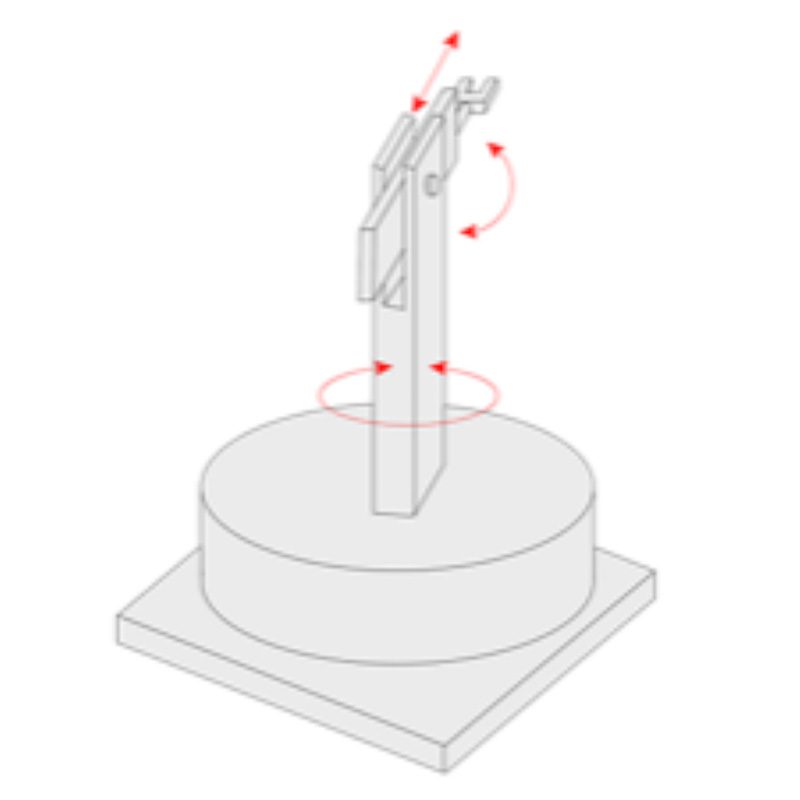
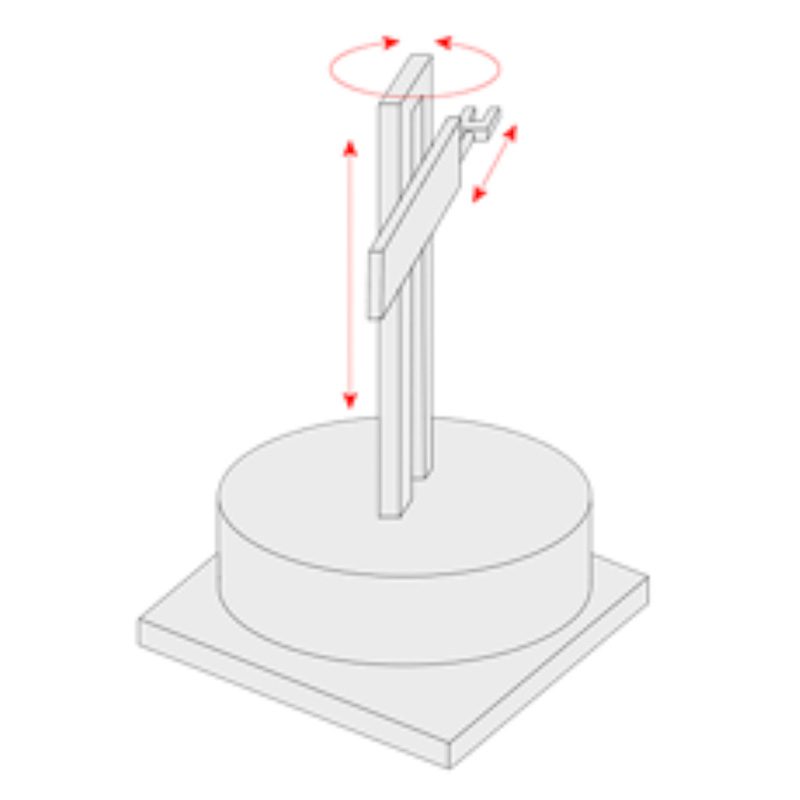
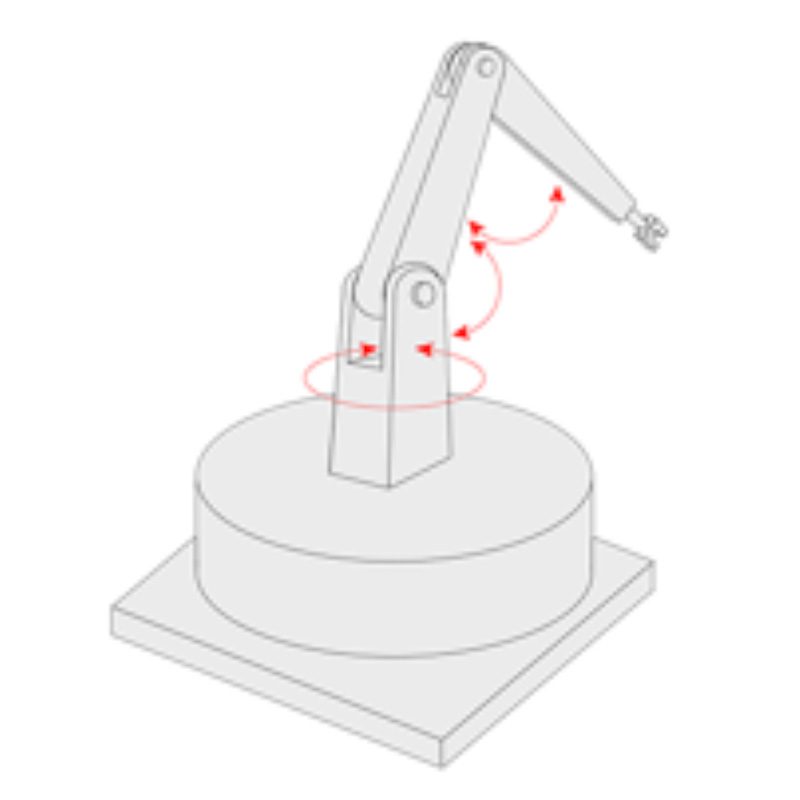
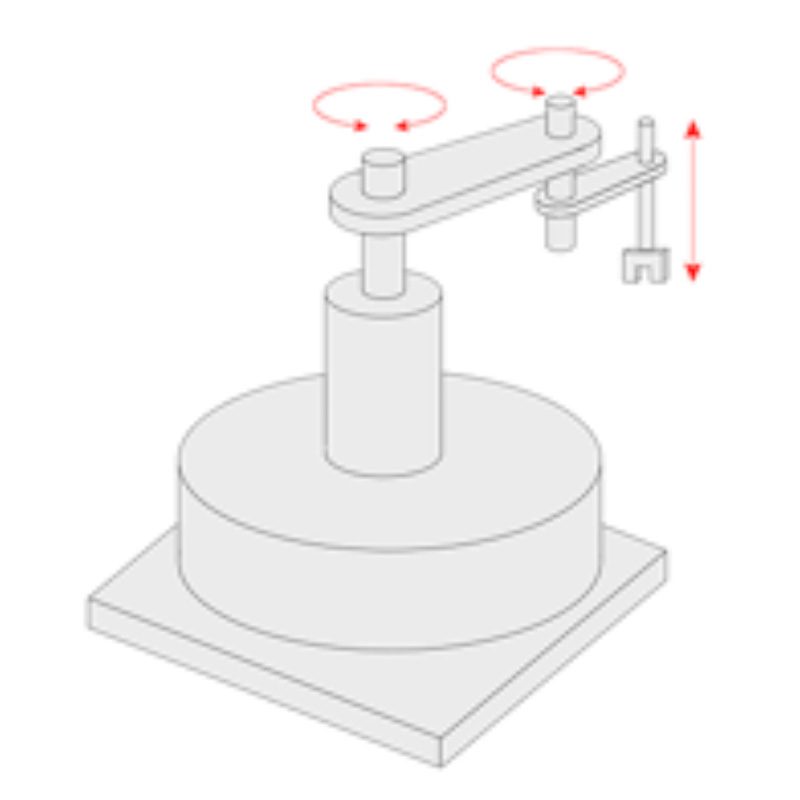
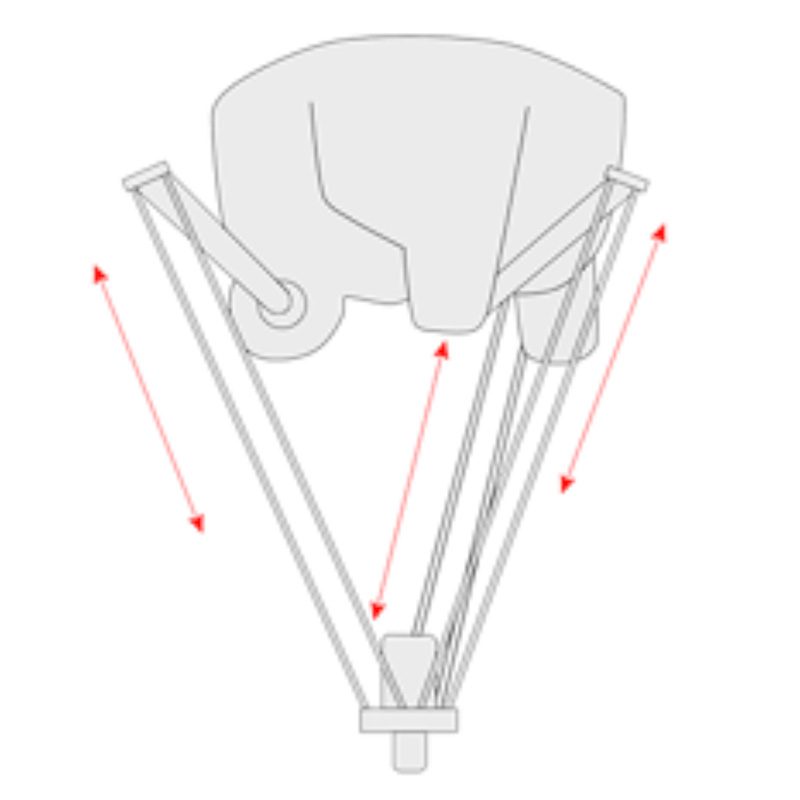
工业机器人主要可分为6种类型。左起依次为“极坐标型机器人”、“圆柱坐标型机器人”、“直角坐标型机器人”、“垂直多关节型机器人”、“水平多关节型机器人”、“并联型机器人”。其中赋予“水平多关节型机器人”双臂的,正是川崎重工制造的协作机器人“duAro”。
新时代工业机器人的形态
传统型的工业机器人,高速且动力强劲,其性质决定需要与人类操作人员隔离开来,将其单独安装在安全栅栏中。而另一方面,近年来备受瞩目的新类型则是能与人类共存于同一空间的协作机器人。其特点是,无需栅栏等大型安全设备,节省空间,专用设备也随之减少,可以灵活地应用到各类现场中。例如,川崎重工的双臂水平多关节机器人“duAro”就是一种协作机器人,可以将其精巧地安装在一名人类操作人员的工作空间中。运用其两条手臂,可以实现与人类一样的动作,从事便当装盘、洗碗、化妆品包装等作业。川崎重工还正在利用“duAro”,开发用于垃圾回收再利用现场的自动垃圾分类系统。
此外,川崎重工制造的远程协调操作机器人系统“Successor”,也在机器人领域中起到了抛砖引玉的作用。“Successor”可以通过控制器单元远程操作远处的机器人,机器人以往被认为难以实现“需要人类感觉的作业”,“Successor”在这方面开辟了新的可能性。它还具备“技能传承机器人”这一重要层面。不用编程即可直接向“Successor”示教人类的细微动作,只要机器人记住了匠人的技术,新人就可以通过机器人去学习匠人的技术。支持多重控制,让一名操作员同时操作多台机器人,利用高速通信网,未来也许可以实现从一个地方控制全世界各地的工厂。面对即将到来的智能工厂时代,这的确是一套极为实用的系统。

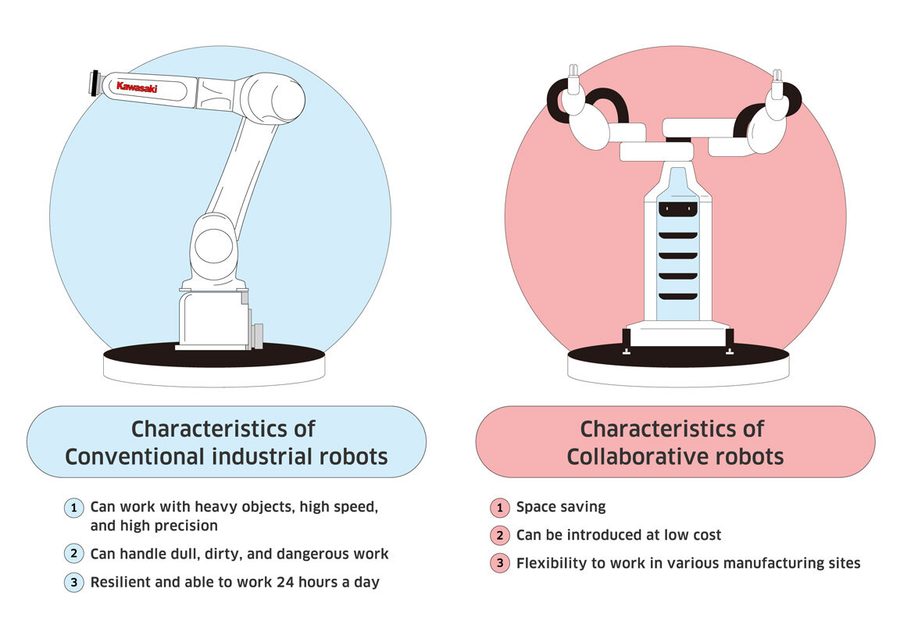
传统的工业机器人需要用安全栅栏围起来,而协作机器人的特点是可以与人类在同一空间内并肩工作。川崎重工利用协作机器人“duAro”,开发出了“资源垃圾分类作业支援系统”。其安装空间仅相当于一位人类操作员,节省空间且具有两个机械臂,可以与人类操作员在同一条线上进行传送带分拣作业。
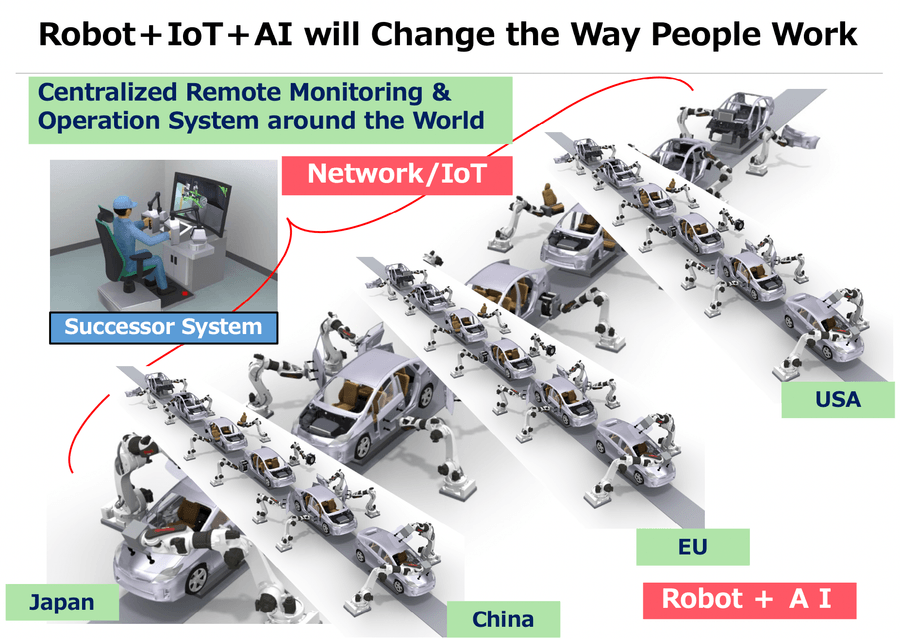
“Successor”是一个远程协调操作机器人系统,可以通过被称为“Communicator(发报机)”的控制器单元对机器人进行远程操作。目前正在继续进行更深度的开发,未来希望实现的应用场景包括:利用高速通信网从办公室控制远方的工厂作业。